






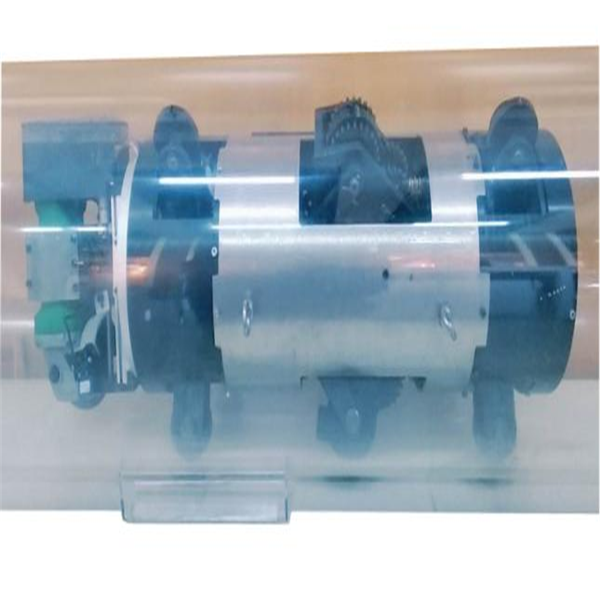

核电工程部分管道焊缝需进行内部打磨,其中大量焊缝无法通过人工方式实现打磨。管道焊缝的打磨作为焊接工序中重要的一个环节,是保证管道焊接质量的必要条件,打磨质量的参差不齐会为潜在的不合格焊缝留下质量隐患。针对这一问题新诺机器人公司研制开发,设计、制造一种由打磨执行单元、驱动单元和控制单元组成的管道内部焊缝打磨机器人,实现远程控制机器人在管道内部完成焊缝的打磨工作,确保管道焊接质量。
管道机器人是一种可沿多管径管道内部操控行走、携带一种或多种施工与检测模块,在工作人员的遥控操作或计算机自动控制下, 进行一系列管道作业的机、电、仪一体化系统,广泛应用于核工业建设、石油石化施工与检测、城市管线维修维护等管道应用比重大的行业与领域。






 在线交谈
在线交谈 邮箱
邮箱 13202295804
13202295804

